Category Archives: Tapahtumat
Nuorisossa on tulevaisuus
Viimeisimmän KIRA-digin rahoituskierroksen kokeiluhankkeissa oli innostava hanke:
Kliffa 2018
Hakija: Pääkaupunkiseudun Partiolaiset ry, Kliffa2018 piirileiri
Suunnitellut yhteistyötahot: Segma Solutions, Microdata FInland Oy ja LoRa.Hankkeessa on tarkoitus toteuttaa alueellinen IoT verkko, joka palvelee Kliffa 2018 leirin rakentamisen, logistiikan ja käytönseurannan tarpeita. Anturiverkon runkoyhteydet toteutetaan LoRa – radioverkolla, jonka kautta tiedot kerätään teollisuusstandardin antureista. Tiedot kootaan keskitettyyn tietovarastoon ja esitetään internetin yli alueen johtokeskukseen visualisoituna karttanäkymänä. Toteutus dokumentoidaan ja julkaistaan yleisesti hyödynnettäväksi
![]() Tarkemmin hankkeesta voi kuulla kokeiluhankkeiden kick-off -tilaisuudessa ke 7.2. Tilaisuudet lähetetään suorina videolähetyksinä ja edellisten tallenteetkin ovat vielä tallessa. Jossain.
Tarkemmin hankkeesta voi kuulla kokeiluhankkeiden kick-off -tilaisuudessa ke 7.2. Tilaisuudet lähetetään suorina videolähetyksinä ja edellisten tallenteetkin ovat vielä tallessa. Jossain.
Partio on harrastus, jossa vastuuta annetaan jo nuorella iällä. Kuten AapoR:lle, joka 21-vuotiaana vastasi 40 hengen videotiimin ja ulkopuolisen toimittajan tekemisestä. Tosin geenit taitavat olla Aapolla kohdallaan 😉 Unelmat ja tavoitteet ovat korkealla, kuten nykyajan nuorilla aina.
Kaupunkipyöräilyä Bostonissa
Minulla oli viime viikolla tilaisuus osallistua FOSS4G-konferenssiin Bostonissa. Kun sää oli kovin suosiollinen, niin oli pakko kokeilla paikallisia kaupunkipyöriä.

Hubway-järjestelmä on hyvin samankaltainen Helsingin kaupunkipyörien kanssa. Molemmissa on omat hyvät ja huonot puolensa.
Asemia Bostonissa on reilu 180 ja se riitti mainiosti minulle. Perusmaksuihin sisältyy 30 minuuttia pyöräilyaikaa ja sen jälkeen alkaa juosta sakkoa. Bostonin majapaikasta oli navigaattorien mukaan 31 minuutin matka Harvardin kampukselle, joten välissä piti tehdä pyöränvaihto. Ei ongelma, mutta matkan päällä ei tietysti tiedä onko pyöriä asemalla vapaana. Lisäksi jos asema oli täynnä, niin piti etsiä uusi asema. Helsingin tapaista palvelua, jossa pyöriä tasaillaan asemien välillä en huomannut.
Järjestelmä löytyy kätevä karttakäyttöliittymä, lisäksi käyttöliittymästä on helppo tarkastella omia matkoja. Tosin amerikkalaisten Export-toiminto on heikko: ei CSV:tä tms.


Viikon reissulle edullisin tapa oli ostaa yhden kuukauden käyttöoikeus (20 USD). 72-tunnin olisi maksanut 15 USD ja 24h 8 USD. Mielenkiintoinen ominaisuus oli se, että ostoksesta sai tunnistekoodin, jonka avulla pyöräaseman automaatista sai käsiinsä muovisen lätkän, jolla pyörä otettiin käyttöön:

Hubway:lla on offline tilassakin toimiva mobiilisovellus. Kun tuli paniikki vaihtaa pyörää n. 25 min ajon jälkeen, niin sovelluksen avulla oli helppo etsiä lähin pyöräasema. Tosin jos asema oli tyhjä tai täynnä, niin sitten tulikin aika kiire seuraavalle. Noh, tämmöinen tapahtui kerran viikon ajojen aikana.
Tarkennus: jos asema on täynnä, niin saa 15 min lisäaikaa, kun vilauttaa korttia asemalla, Thanks @Hubway about clarification!
https://help.thehubway.com/hc/en-us/articles/115006255887-Redistribution

Pyöräillen näki tietysti enemmän kuin kävellen ja miellyttävämmin kuin bussissa/autossa istuen. Metrosta puhumattakaan. Luonnollisesti piti myös kokeilla kuinka Mapillaryn katukuvaukset onnistuvat Bostonissa. Action-kameran kiinnittäminen kaupunkipyörän tavaratelineeseen onnistui lievän virittämisen jälkeen:

Suurempaa haastetta tuli kännykän kiinnittämisestä: laastariteipillä viritetty kännykän juoksutasku toimi tässäkin tapauksessa. Ensi kerralla muistan pakata mukaan nippusiteet ja jesaria. Kännykkä on tarpeellinen helppoon ja turvalliseen suunnistamiseen.

Tämä sama ongelma on myös Helsingin kaupunkipyörissä: tuntemattomissa paikoissa suunnistaminen on hieman hankalaa, jos joutuu pysähtymään ja kaivamaan kännykkää taskusta. Ja yhdellä kädellä kurvailu on luonnollisesti kiellettyä 😉 Kovin paljoa ei Bostonissa ei ole Mapillary kuvia tuotettu, joten toivottovasti esimerkki innostaa paikallisia kuvailemaan pyöräteitä.


Kaupunkipyörähaaste – Suoritettu!
Ensimmäinen kaupunkipyörähaaste on nyt suoritettu: kaikki Espoon kaupunkipyöräasemat pyöräilty läpi. Haaste alkoi Ruomelantien asemalta klo 11:32 ja Nokkalan pyöräasemalla olin 12:11. Aikaa meni siis 39 minuuttia, sekunteja ei tässä kannata ruveta laskemaan. Vielä.

Omasta käyttöhistoriasta kaapattuna. Miksi noita ei muuten saa ladattua CSV-tiedostona? Haloo HSL: Mydata on se kova sana!
Minulle varmaan tavoiteaika voisi olla siinä 30 minuutin tienoilla,. Oikeat pyöräilijät varmaan saavat leikitellen 20 minuuttia rikottua.
Suurempia ongelmia ei ollut pyörien kanssa. Ainoastaan Suomenlahdentien asemalla en saanutkaan uutta pyörää alle, vaan jouduin ottamaan uudestaan saman pyörän alle.
Kuten voi arvata niin suurimmat ulkopuoliset ongelmat tulivat siitä, että OpenStreetMap:istä(kin) puuttui työmaita, jotka aiheuttivat lievää kiemurtelua reitillä:

Kuunkadun pohjoispuoli ei ollutkaan ajokunnossa

Matinkartanontien asemalle saavuttaessa Matiraitti oli poikki. Ei mitään viitoitusta kuinka olisi voinut kiertää työmaan. Tuli kokeiltua maasto-ominaisuudet: ruohikolla ihan jees
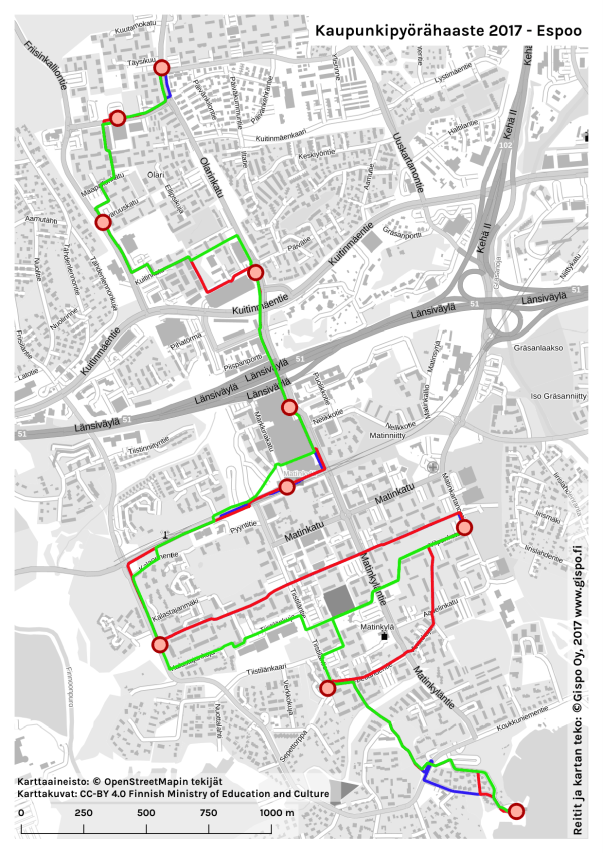
Kaikkia tietysti kiinnostaa, että kuinka suunnistaminen onnistui. Noh, kohtuullisesti. Maasto on tietysti aika tuttua ja muutamat koukkaukset laitan maastossa olleiden esteiden syyksi 😉 Klikkaa karttaa, niin pääset selailemaan tarkemmin reittiä.

Haaste myös videotiin, mutta siinä nyt ei ole hirveästi katseltavaa. Voin sitä näyttää, jos joku joskus ehdottomasti sitä vaatii. Poistun kyllä sitten itse paikalta hyvin nopeasti. Videoinnin lisäksi huoltojoukot suorittivat still-kuvaukset Mapillary-palveluun.

Koko jotoksen voi siis selata myös Mapillaryn-palvelusta

Huomioita muille suorittajille
Muutamia pikaisia vinkkejä, jos joku muu haluaa suorittaa haasteen:
- Matkakortti voi olla nopeampi kuin tunnusluku/pin
- Kannattaa odottaa että pyörä on palautunut, ennen kuin rupea syöttämään toiseen pyörään tunnusta
- Vesipullo kannattaa kuljettaa korissa. Reppu ei ehkä ole paras väline. Tavaroiden heittäminen etukorista toiseen sujuu helposti
- Nopein ajankohta lienee aamuyöstä, kun muuta liikennettä ei ole häiritsemässä
- Korkeuserojen huomioiminen säästää pohkeita. Tai tietysti jos sykettä nyt erityisesti hakee, niin asiahan on toinen.
- Pitäisi saada joku Leaderboard aikaiseksi 😉
Lopuksi toivotetaan kaikille kaupunkilaisille oikein hyvää äitienpäivää! Laittakaa äidit pyörän päälle!
Kaupunkipyörähaaste – osa 1
Viime vuonna HSL aloitti kaupunkipyörien kokeilun Helsingissä. Suosio oli valtava ja itsekin käytin useampaan kertaan pyöriä. Tänä vuonna kaupunkipyörien määrä on kasvanut huimasti ja asemat ovat laajentuneet myös Espooseen. On siis aika aloittaa Kaupunkipyörähaaste!
Kaupunkipyörähaasteessa on tarkoitus kiertää kaupunkipyöräasemat. Sarjoja voi laatia useita: kaupunginosa-, kaupunki- tai koko kaupunkipyöräverkostosarja. Itselleni sopii parhaiten tuo keskimmäinen: joten tänään aion suorittaa (ensimmäisenä?) Espoon kaupunkipyörähaasteen!

Kaupunkipyöriä Espoon Olarissa
Suunnittelu
Haasteen suorittaminen kannattaa aloittaa huolellisella suunnittelulla. Ensin valitaan haasteen alueellinen kattavuus ja tarkistetaan pyörien lukumäärät eri asemilla. Tähän soveltuu parhaiten Kaupunkifillarit.fi -sivusto. Espoossa näyttää pyöriä olevan tasaisesti saatavilla:

Seuraavaksi ongelmaksi nousee reitinvalinta: mikä on paras/nopen reitti kulkea kaikki kaupunkipyöräasemat läpi? Perinteisessä suunnistuksessa on helppoa, kun rata on valmiiksi valittu, pitää tehdä ainoastaan paras reitin valinta rastipisteiden välillä. (Huomautus paikkatietoanalyytikoille: ei ole mitään valmista järjestelmää/aineistoa, joka tähän oikeasti sopisi. Älkää tarjoilko mitään kaupallisia tai avoimia järjestelmiä: niissä ei ole riittävästi tietoa haasteen tarpeisiin. Piste. Voi kommentoida alla, niin murskaan sitten ne teidän ns. ”perustelut” 😉
Tavallisille haasteeseen vastaaville löytyy muutamakin mahdollisuus tehdä ihan riittävän hyvä reitinvalinta. Espoon kaupunkipyörähaaste on reitinvalinnan suhteen helppo: lähdetään pohjoisesta ja edetään etelään Nokkalaan. Kaiken lisäksi Nokkalan Majakka tarjoaa haasteen suorittajalle palautumiseväät hienossa ympäristössä. Kesällä voi ehkä pulahtaa myös uimaan.
Kokeilin optimaalisen reitin valintaa useammallakin OpenStreetMap-pohjaisella välineellä. Päädyin kolmeen suhteellisen hyvään työkaluun: Skobbler, OpenRouteService ja Graphhopper. Kaikissa palveluissa voi tehdä reitinoptimoinnin pyöräilijöille ja reitin voi ladata GPX-tiedostona, jota voi sitten käyttää GPS laitteessa tai kännykässä. Lisäksi kaikissa on myös API, joten näppärät koodaajat voivat toteuttaa omia palvelujaan kaupunkipyörähaasteeseen.

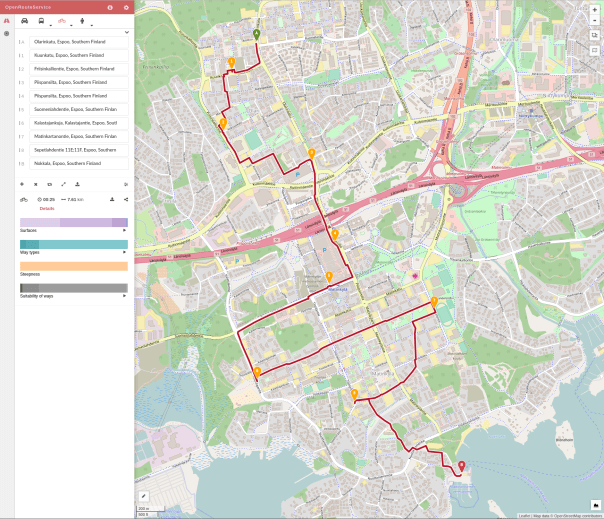
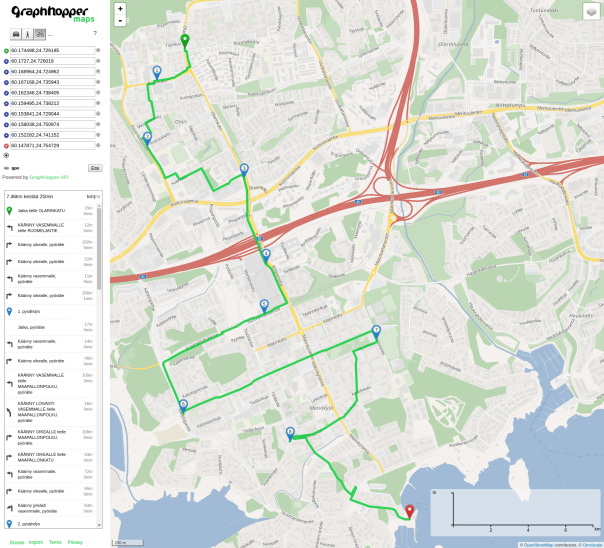
Itse siirsin vielä GPX-reitit QGIS-ohjelmistoon ja tein paperikartan (työskentelen ICT-alalla, en luota sähköisiin tietovälineisiin).
Toteutus
Mukaan ei oikeastaan tarvita muuta kuin käyttöoikeus Kaupunkipyöriin. Varaan itselleni nyt kuitenkin mukaan GPS-laitteen (GPX-reitin tallentamista varten), tulostetun reittikartan, vesipullon ja pyöräilykypärän. Kamat on suunnilleen pakattu, joten klo 11 jälkeen on tarkoitus lähteä liikkeelle. Perillä Nokkalassa joskus klo 11:30 jälkeen: ajamiseen mennee reilu 20 min ja vaihtoihin sitten jotain. Raportoin tarkemmin siten myöhemmin, jos olen suorittanut Kaupunkipyörähaasteen.
#PostGISDay on tänään!
 Tänään vietetään kansainvälistä PostGISDay:tä. Päivän tarkoituksen on tuoda esiin avoimen lähdekoodin paikkatieto-ohjelmistojen ja avoimien paikkatietoaineistojen merkitystä paikkatietojen hyödyntämisestä.
Tänään vietetään kansainvälistä PostGISDay:tä. Päivän tarkoituksen on tuoda esiin avoimen lähdekoodin paikkatieto-ohjelmistojen ja avoimien paikkatietoaineistojen merkitystä paikkatietojen hyödyntämisestä.
Pääkaupunkiseudulla voit osallistua kahteen tapahtumaan: OSM Kahvit Espoo tai OSM GeoBeers. Kovakuntoisimmat juovat ensin kahvit Espoossa ja kiirehtivät sitten itäisen satamakaupungin humuun.
Jos et pääse esteiden tai etäisyyden takia mukaan tapahtumiin, niin voit tutustua PostGIS:n perusteisiin ja HOT Finlandin toimintaan oheisten videoiden avulla.
Paikkatiedon kokoontumisajot lähestyvät
 Ensi viikolla pidetään taas vuosittaiset paikkatietoalan kokoontumisajot. Juorumarkkinoiksikin kutsutut Paikkatietomarkinat kokoavat reilu 2000 lähinnä paikkatietoalan sisäpiirin edustajaa Helsingin messukeskukseen. Urbaaninhuhun mukaan joka vuosi paikalle eksyy muutama ulkopuolinen henkilö: todennäköisesti poistuvat ennen tiistai-illan Linkkibuffettia (tämä oli ennen Linkkibileet, mutta ilmeisesti biletys jää pois), joka lienee se tärkein verkostumistilaisuus.
Ensi viikolla pidetään taas vuosittaiset paikkatietoalan kokoontumisajot. Juorumarkkinoiksikin kutsutut Paikkatietomarkinat kokoavat reilu 2000 lähinnä paikkatietoalan sisäpiirin edustajaa Helsingin messukeskukseen. Urbaaninhuhun mukaan joka vuosi paikalle eksyy muutama ulkopuolinen henkilö: todennäköisesti poistuvat ennen tiistai-illan Linkkibuffettia (tämä oli ennen Linkkibileet, mutta ilmeisesti biletys jää pois), joka lienee se tärkein verkostumistilaisuus.
Gispo Oy:llä ei tänä vuonna ole omaa osastoa, mutta jos tunnistat meidät sankasta joukosta, niin pyydä tarroja tai postikortteja. 50 ensimmäistä saavat paikkatieto-ohjelmiston käyttöönsä loppuelämäksi (sisältää sekä paikkatietoaineistoja että versiopäivitykset).
Paikkatietomarkkinoiden ohjelma on hyvin monimuotoinen. Pääsalin ohjelmassa on koottuna ajankohtaista yleistä tietoa, jonkinlaista megatrendien seuraamista. Tänä vuonna kuuma peruna on SOTE. Näin vaikkakin SOTEn liittyvät paikkatietoanalyysit on jo tehty ja analyysien lopputulos on jätetty huomioimatta poliittisessa päätöksenteossa.
Tietoiskuohjelma koostuu näytteilleasettajien kaupallisista puheenvuoroista: näistä ei etukäteen voi tietää onko kyse täysin kaupallisesta tuoteluettelon esittelystä vai olisiko jokin asiakin eksynyt mukaan puheenvuoroon. Kun itsekehu ei oikein suomalaisilta onnistu, niin toinen linja on valjastaa sitoutettu asiakas kertomaan omaa sanomaa. Vapaataitelija A.Ahola on kerännyt tietoiskuista kokonaisuuksia eri kävijäprofiileille. Osa tietoiskuista tulee olemaan ääriämyöten täynnä ja toisissa on sitten enemmän tilaa. Vinkki: jos haluat varmistaa istumapaikan sille mielenkiintoiselle tietoiskulle, mene kuuntelemaan jo edellinen puheenvuoro. Tästä vinkistä johtuen monet voivat saada ansiotonta kuulijakuntaa 😉
Gispo Oy on mukana muutamassa ohjelmanumerossa. Sponsoroimme yhdessä HSL:n ja CGI:n kanssa OpenStreetMap-mapthonia (ti 8.11. klo 12-16). Mapthonissa on hyvä käydä katsomassa kuinka OSM:iä kartoitetaan ja kuinka sitä voi hyödyntää omassa toiminnassa. Tietoiskuissa on myös monta puheenvuoroa OpenStreetMap:n hyödyntämisestä. Keskiviikkona (klo 9-11) järjestetään JHS-seminaari, jossa on oiva tilaisuus kuulla Julkisen Hallinnon Suositukseen -liittyvistä asioista, myös Paikkatiedon Viitearkkitehtuurin saloja avataan.
Kuka on vaihtanut työpaikkaa? Mitkä virastot yhdistetään ensi vuonna? Mikä on kuumin ohjelmistotuote? Mikä laitevimpain on kaikkien saatava ensi vuonna? Kuka on menestyjä ja kuka häviäjä? Nähdään ensi viikolla Paikkatietomarkkinoilla!
WeLoveMaps – Haluan perustaa karttapalvelun – mitä teen?
Paikkatietomarkkinoiden I päivän iltapäivällä Suomen Kartografinen Seura (SKS) järjesti ”Tykkäämme kartoista – We love maps!” -seminaarin. Ohjelmassa oli perinteisten puhujapöntössä sessioiden lisäksi myös karttaorigamien askartelua.

© Juha Oksanen
SKS julisti Kartta 2016 -haasteen. Nyt on mahdollisuus loistaa kartografina sekä kerätä mainetta. Ammattilaisten sarjan parhaat kartat lähetetään Kansainväliseen Kartografian konferenssin Japaniin. Aikaa toteuttamiseen on riittävästi, aina syyskuun 2016 loppuun asti.
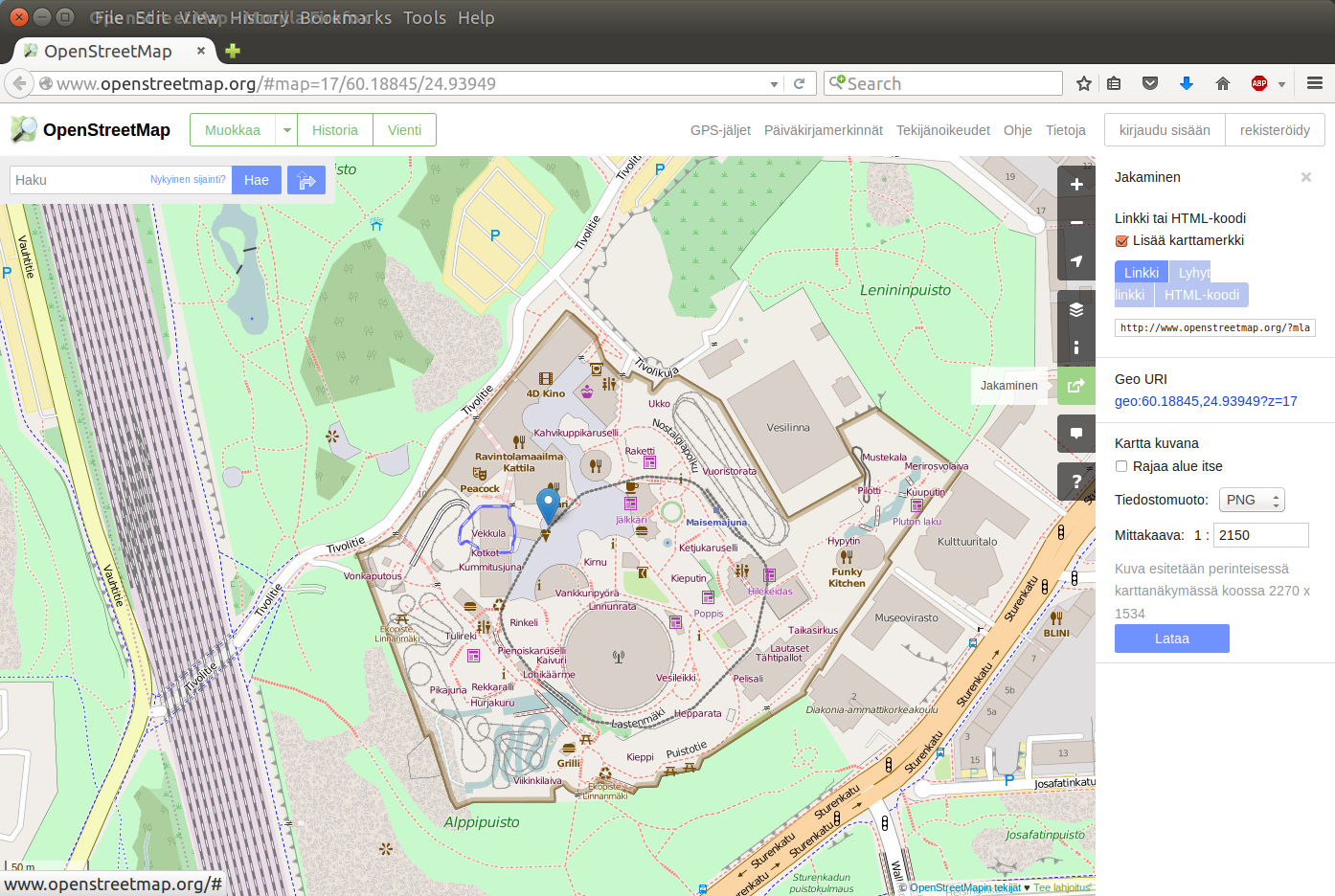
Oma pönttöesiintyminen koski karttapalvelun perustamista. Esityksen aluksi näytin tyypillisen ammattilaisen näkymän web-karttapalvelun toteuttamisesta:
Ei herättänyt suurta mielenkiintoa, joten siirryin sujuvasti näyttämään kuinka ilman varsinaista koodaamista voi tuottaa omat karttapalvelunsa. Luonnollisesti hyödyntäen avoimia tietoaineistoja ja avoimen lähdekoodin ohjelmistoja.
OpenStreetMap
Helpoin tapa tehdä yksinkertainen karttapalvelu on hyödyntää OpenStreetMap:in ”Jakaminen” toimintoa. Valitse OSM:n karttakäyttöliittymästä oikealta ”Jakaminen”. Laita ”Lisää karttamerkki” -kohtaan ruksi, siirrä karttaa oikeaan paikkaan. Kopioi joko suora linkki sähköpostiin tai upota HTML-koodi omalle web-sivullesi. Esimerkit löydät WeLoveMaps-sivultani.
Perinteinen web-kartta
OpenStreetmapin upotettu HTML-koodi riittää varmaan monelle kartoista kiinnostuneille. Jos on tarpeen julkaista hieman monimutkaisempia karttoja, niin niiden tekeminen onnistuu esimerkiksi QGIS-ohjelmiston qgis2web-laajennoksen avulla. Laajennoksen avulla voi helposti tuottaa OpenLayers tai Leaflet -javascript kirjastoihin perustuvan karttapalvelun.

3D kartta
Kaikilla näyttelyosastoilla näytti olevan mitä hienoimpia 3D esityksiä paikkatiedoista. Joten olihan sellainen myös tehtävä. QGIS:n qgis2threejs-laajennos mahdollistaa helposti 3-ulotteisen karttakäyttöliittymän julkaisun:
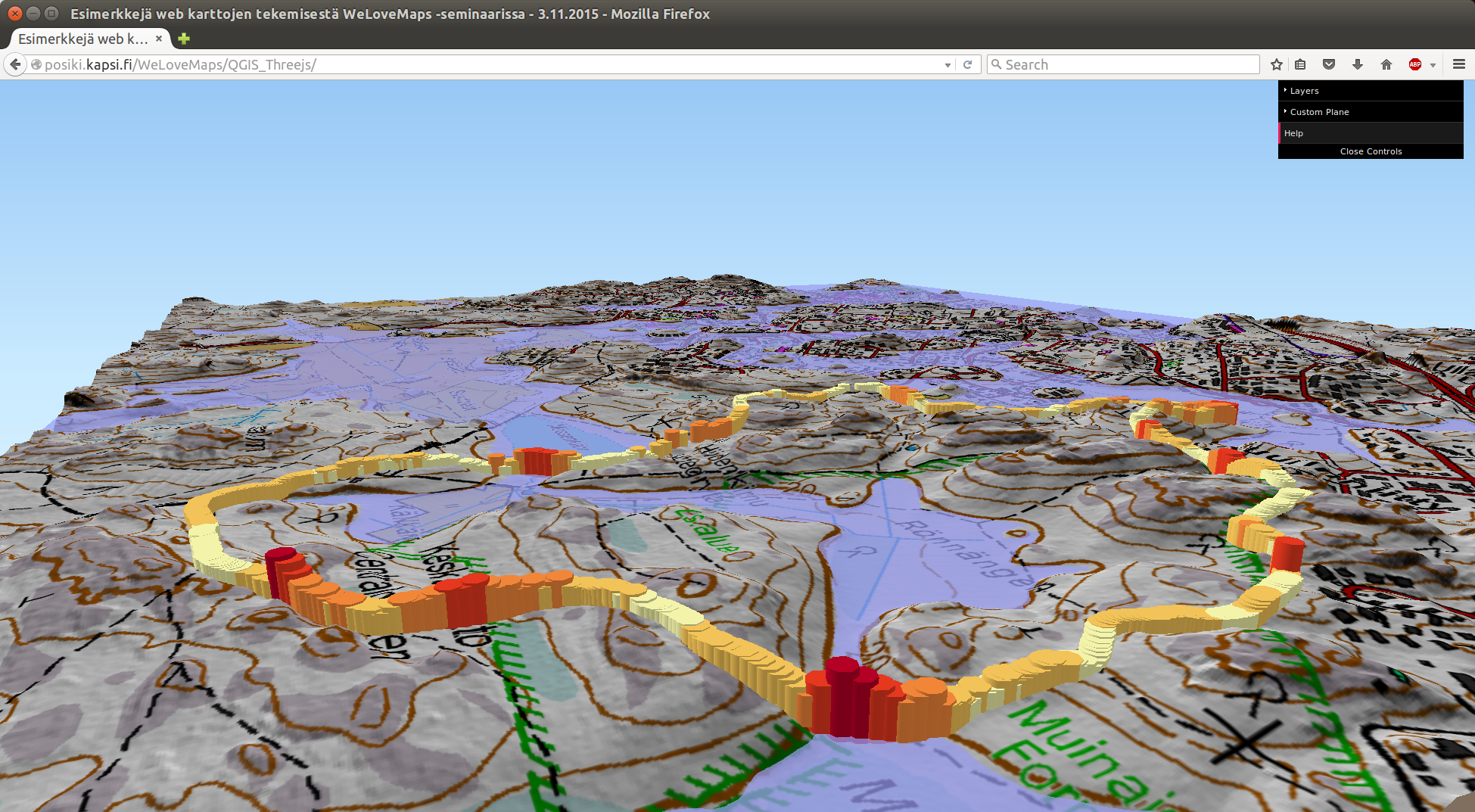
Kaikista edellä mainituista löytyvät esimerkit (ja lähdekoodit) WeLoveMaps-sivultani. Voit myös ladata valmiit QGIS-tiedostot paikkatietoaineistoineen omaan käyttöösi (noin 30 Mt ZIP-tiedosto). Happy Mapping!
Paikkatietomarkkinoiden satoa
Alkuviikolla pidettiin Paikkatietomarkkinat. Viiden vuoden tauon jälkeen olin tiskin toisella puolella. Ei se maailma kovin erilainen ole näyteilleasettajan puolelta. Mitä nyt on hirveä kiire ennen, aikana ja jälkeen. Asiaa ei tietysti helpottanut 4 esiintymistä erilaisissa foorumeissa. Lupasin, että kalvot tulevat ladattavaksi nettin. Myös joitain tarkempia ohjeita keräilen tässä kokoon, lähiaikoina on siis tulossa useampia kirjoitelmia eri aiheista.
Ensimmäinen esitykseni koski projektia, jossa selvitimme Espoon kaupungille liito-oravien mahdollisia liitopolkuja. Tavoitteena oli paikkatietoanalyysien avulla selvittää mistä kohdin liito-oravat mahdollisesti ylittävät Espoon pääväyliä (Kehät I, II, III, Turunväylä ja Länsiväylä). Kalvot löytyvät ensimmäisen kuvan takaa (pdf, 6 Mt)

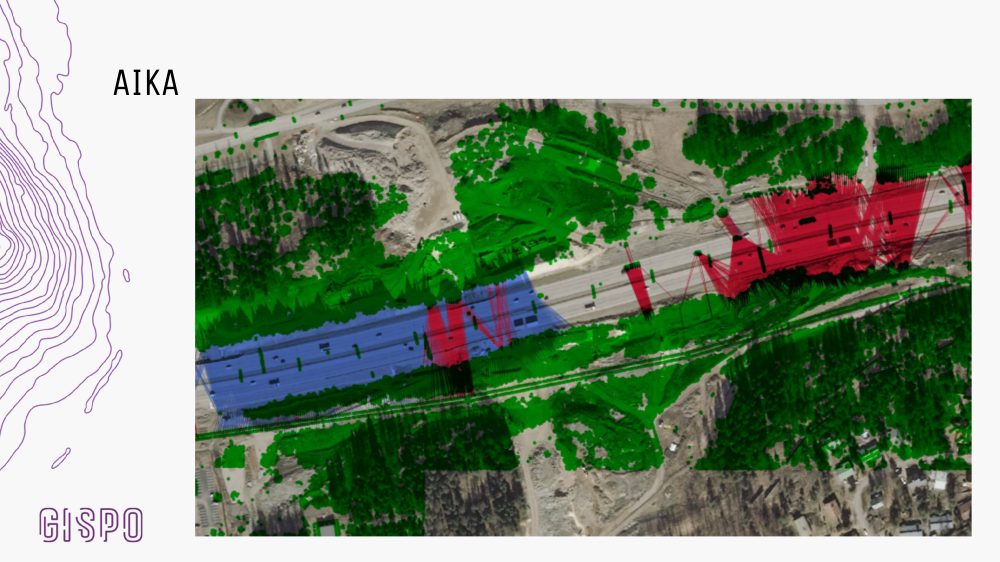
Seuraavassa kuvassa on visualisoitu liitopolkuja Länsiväylän yli Niittykummun kohdalla.

Aina paikkatietoanalyysin tulokset eivät vastaa todellisuutta. Oheisessa esimerkissä on Turvesolmun kohdalta laskennan tulokset. Lähtöaineistona käytetty LIDAR-aineisto oli vuodelta 2013,. Kuvan taustalla olevasta ortoilmakuvasta voi nähdä, että alueella ei ole enää puustoa. Tuskinpa myöskään liitopolkuja.
Havaintoja FOSS4G:stä
Viime sain viettää pitkän konferenssiviikon Etelä-Korean Soulissa. Työpajojen jälkeen FOSS4G-konferenssi jatkui esityksillä ja Code Sprint-tapahtumalla. Muutamia havaintoja muistiinpanoistani:
- OSGeo:n presidentti, Jeff McKenna, mainitsi avauspuheenvuorossa, että avoimen lähdekoodin paikkatieto-ohjelmistot ovat nyt laajasti tiedossa ja mielenkiinnon kohteena. Yhtenä esimerkkinä hän mainitsi suositun GIS-blogin 10 kysymyksen muutamaa kysymystä:
 Vastaukset ovat hyvin mielenkiintoisia, jopa yli 20 vuotta ESRIUC:ssa käyneiden osalta.
Vastaukset ovat hyvin mielenkiintoisia, jopa yli 20 vuotta ESRIUC:ssa käyneiden osalta. - Yhtenä konferenssin sivutapahtumana oli YK:n paikkatietoesitykset, järjestäjänä YK:n paikkatieto-osasto (United Nations Geospatial Information Section). UN-GIS:n johtaja, Mr. Kyoungsoo Eom, piti esitelmän. Hän kertoi käyttäneensä GRASS-ohjelmistoa jo vuonna 1989, nuorena Etelä-Korean armeijan upseerina. Toivottovasti hänelle on toimitettu ja asennettu uusin versio GRASS-ohjelmistosta (v 7.0). Harvalla paikkatieto-ohjelmistolla on näin pitkä kehityskaari takanaan.
- Konferenssin lopussa Jeff kiitti erilaisia palveluyrityksiä, joita tarvitaan avoimen lähdekoodin paikkatieto-ohjelmistojen käyttöönottoon ja kehittämiseen. Olin mykistynyt ja nöyrän kiitollinen:


Parhaiten konferenssista saa irti kun on itse paikalla. Kaikille tämä ei ole mahdollista ja olen itse liian laiska kirjailemaan kaikkia havaintoja. Onneksi maailmaan mahtuu parempia blogin kirjoittajia, tässä muutamia mausteeksi:
- FOSS4G 2015 by @jodygarnett
- FOSS4G 2015 Seoul Korea – Recap by @jmapping
- What went on at FOSS4G 2015? by @underdark
Esitykset ja videot ovat tulossa näytille, mutta kiireisille muutama linkkejä:
- Presentations at FOSS4G 2015 in Seoul by Sourcepole
- New Geoprocessing Toolbox in uDig Desktop GIS
- Building an OpenLayers 3 map viewer with React
- Jsonix – Talking to OGC Web Services in JSON
- Mobmap: Introduction to People Flow Analysis
- Towards GeoExt 3
Ensi vuonna FOSS4G järjestetään Saksan Bonnissa. Sinne lienee monen suomalaisen olevan helpompi osallistua.
Suomessa taas järjestetään devALPO to 22.10.2015 sekä ALPO-seminaari toukokuussa 2016. Tilaisuuksien järjestelyistä vastaa elokuussa perustettu OSGeo Suomi. Tilaisuudet ovat maksuttomia ja avoimia kaikille, jotka ovat kiinnostuneita avoimen lähdekoodin ohjelmistoista.
Paikkatietomarkkinoilla on mahdollisuus tutustua avoimen lähdekoodin paikkatieto-ohjelmistoihin, osastolla M4. Tietoiskut ti 3.11. klo 12 ja ke 4.11. klo 11:30.
FOSS4Gn työpajoissa
Osallistuin kolmeen työpajaan FOSS4G-konferenssissa:
- Exploring the Sensor Observation Service Standard Enhanced by IstSOS Special Features
- Open IoT Made Easy: a Tutorial on the OGC SensorThings API with SensorUp
- _drOne Day Workshop: Build a Drone and OpenDroneMap
Näistä ei yksikään ei ollut pettymys. Työpajojen valinnassa kannattaa olla innovatiivinen: jos joku asia on jo tuttu, niin FOSS4G:n työpajat eivät välttämättä sisällä uutta tietoa. Lähinnä niissä on mielestäni parasta oppia jotain uutta. Kaikista opin uutta ja sain uusia ideoita.
istSOS
istSOS on Python-perusteinen paikkatietosovelluspalvelin, joka mahdollistaa erilaisen sensoritiedon tallentamisen ja jakelun. Yksi merkittävimmistä ominaisuuksista on tuki OGC:n SOS-rajapinnalle (Sensor Observation Service): tämä on lienee tärkeä ominaisuus eurooppalaisille sensoritietojen jakelijoille ja käyttäjille.
Työpajassa käytimme virtuaalikonetta, johon oli valmiiksi ladattuna istSOS sekä esimerkkiaineistoa. Mielenkiintoinen osuus työpajasta oli oman sensorin rakentaminen ja sen tietojen lataaminen istSOS:n tietokantaan (PostGIS, luonnollisesti).
Sensorina toimi Arduino -mikro-ohjain-alusta ja siihen liitetty lämpösensori. Sensori koottiin paloista ja siihen ladattiin ohjelmisto, joka teki halutun mittauksen.
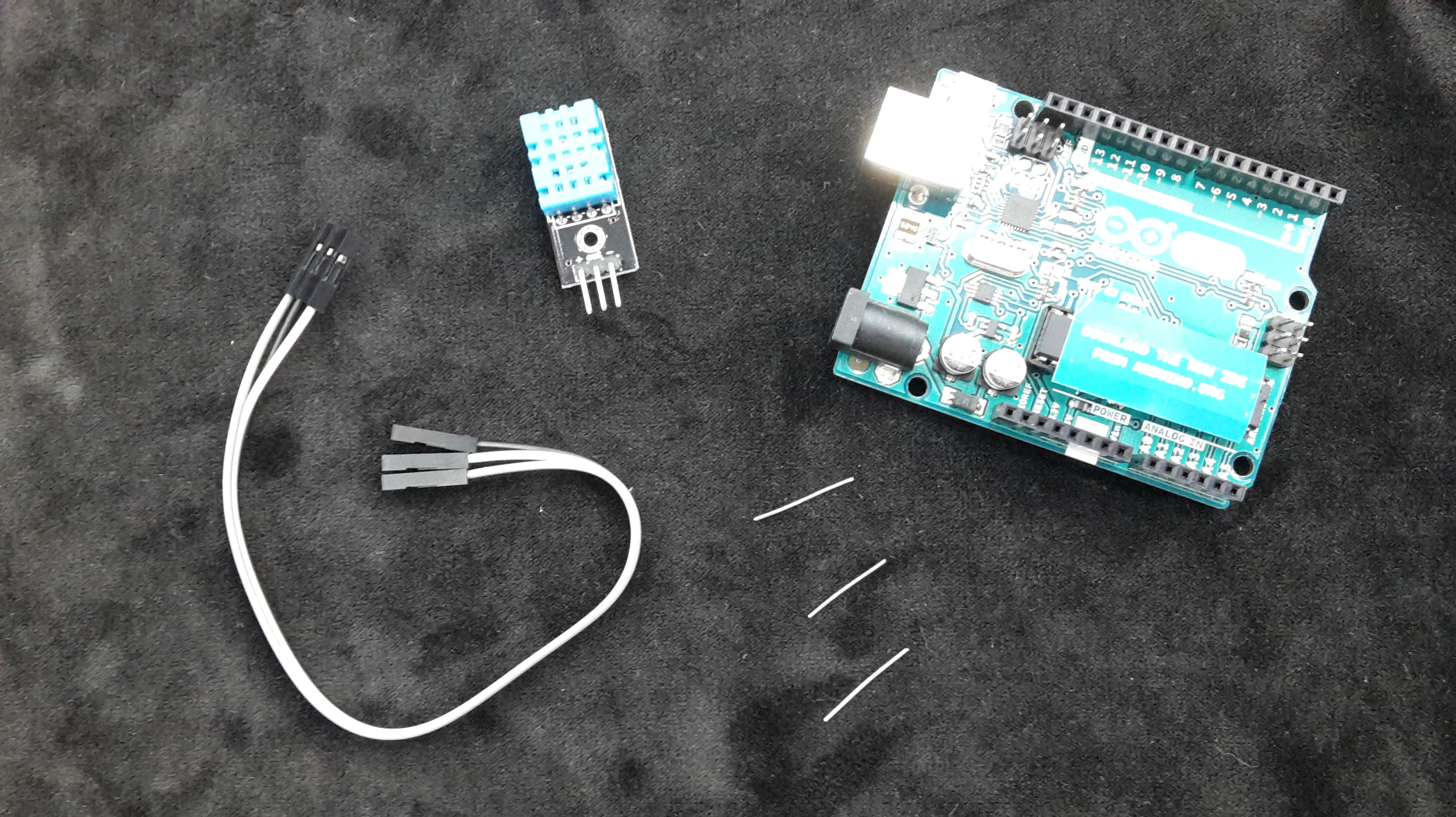 Sensori kytkettiin tietokoneesen. Yllättäen saimme sensorin toimimaan: Windows koneessa oleva virtuaalikone (Ubuntu) luki sensorin tietoja. Tosin ensin koetimme olla liian ovelia (konfigurointiin lukemaan sarjaportista, vaikka Windows osasi emuloida tiedot suoraan USB-porttiin).
Sensori kytkettiin tietokoneesen. Yllättäen saimme sensorin toimimaan: Windows koneessa oleva virtuaalikone (Ubuntu) luki sensorin tietoja. Tosin ensin koetimme olla liian ovelia (konfigurointiin lukemaan sarjaportista, vaikka Windows osasi emuloida tiedot suoraan USB-porttiin).
Muutamalla Python-skriptillä sensorin tiedot luettiin istSOS:n ja hallintakonsolista pystyi seuraamaan työpajatilan kuumenemista:

OGC SensorThings API
OGC SensorThings API on kohta hyväksytty OGC:n standardi. Standardi on käsitykseni mukaan ensimmäinen avoin standardi esineiden Internetin (Internet of Things, IoT) sensoritietojen välittämiseen. Sensorititiedoilla tarkoitetaan tässä käytännössä ihan mitä tahansa mittaus- tai havaintotietoa. Mittauksen kohteena voi olla siis lämpötila, säteilytiedot, ihmisen pulssi, sähkömoottorin kierrosluku tms.
Mielenkiintosta nähdä leviääkö standardin käyttö muualle kuin paikkatietoalalle. Standardi on laadittu siten, että hyödyntäminen ja käyttö on mahdollista muissakin kuin puhtaissa paikkatietosovelluksissa. Näissä sovelluksissa paikkatieto on useasti tärkeä, mutta kuitenkin sivuseikka.
OpenDroneMap
Kolmannen työpajan taustalla on OpenDroneMap -projekti. Projekissa rakennetaan työkaluja ja työkalujonoa, jonka avulla on helppo tuottaa lennokeista, multikoptereista, kuumailmapalloista ja muista miehittämömistä aluksista otetuista kuvista paikkatietoja (3D pistepilvi, ortokuvat, tekstuurit yms.).
Mutta ennen kuin OpenDropMap-työkalulle on saatavissa kuvia, pitää olla alusta, jolla kamera voidaan kuljettaa ilman. Joten työpajassa rakennettiin ensimmäiseksi oma multikopteri. Tarkemmin yksi ryhmä rakensi multikopteria, yksi lennokkia, yksi rakensi lennonohjaukseen liittyvät modulit ja yhden ryhmän tehtäväksi jäi kolvaus (ja sitä oli paljon!).
Käytännössä multikopterin rakentaminen ei ole vaikeaa. Seurasimme OpenUAV-projektin ohjeita. Luonnollisesti materiaalien hankkiminen ja kaikkeen odottamattomaan varautuminen vievät suunnattomasti aikaa.
Alussa oli vain kasa osia:

Kuvassa on vain pieni osa multikopterin elektroniikasta. Kuvassa näkyy APM 2.6 lennonohjaustietokone, kasa johtoja, telemetrian lähetysradiot, GPS vastaanotin ja muuta sälää.
Muutaman tunnin säätämisen jälkeen oli multikopterin ohjaustietokone ja moottorit valmiina asennettavaksi multikopterin runkoon:

Virrat palavat ja ohjaustietokone on kytketty Mission Planner -ohjelmistoon. Tuon avulla voi suunnitella lentoradat, päivittää ohjaustietokonetta yms.
Asennusten jälkeen päästiin jo kokeilemaan multikopteria ulkona, lievää jatkosäätöä menossa:

Kun olimme valmiit lennättämään, niin ROK Armed Forces lähetti upseerin adjutantin kanssa valvomaan lentoa. Suomessa lennätys olisi onnistunut ilman näin tarkkaa viranomaisvalvontaa:

Tosiasiassa emme saaneet multikopteria ilmaan: ensin väärin kytketyt moottorit (moottorien tulee pyöriä erisuuntiin) ja sitten lennättämisessä rikkoutui joku johdoista. Oppi: tuskin rupean rakentamaan multikopteria, ellei vapaa-aika ilmaannu erityisen paljon jostain.
Jos harkitset oma toimista kopterikuvausta, niin suositeltu kamera on joku Canonin pokkarikameroista. Canon Hack Development Kit on loistava työkalu kuvauksen automatisointiin ja kaikkeen muuhun hauskaan hakkerointiin.
