FOSS4Gn työpajoissa
Osallistuin kolmeen työpajaan FOSS4G-konferenssissa:
- Exploring the Sensor Observation Service Standard Enhanced by IstSOS Special Features
- Open IoT Made Easy: a Tutorial on the OGC SensorThings API with SensorUp
- _drOne Day Workshop: Build a Drone and OpenDroneMap
Näistä ei yksikään ei ollut pettymys. Työpajojen valinnassa kannattaa olla innovatiivinen: jos joku asia on jo tuttu, niin FOSS4G:n työpajat eivät välttämättä sisällä uutta tietoa. Lähinnä niissä on mielestäni parasta oppia jotain uutta. Kaikista opin uutta ja sain uusia ideoita.
istSOS
istSOS on Python-perusteinen paikkatietosovelluspalvelin, joka mahdollistaa erilaisen sensoritiedon tallentamisen ja jakelun. Yksi merkittävimmistä ominaisuuksista on tuki OGC:n SOS-rajapinnalle (Sensor Observation Service): tämä on lienee tärkeä ominaisuus eurooppalaisille sensoritietojen jakelijoille ja käyttäjille.
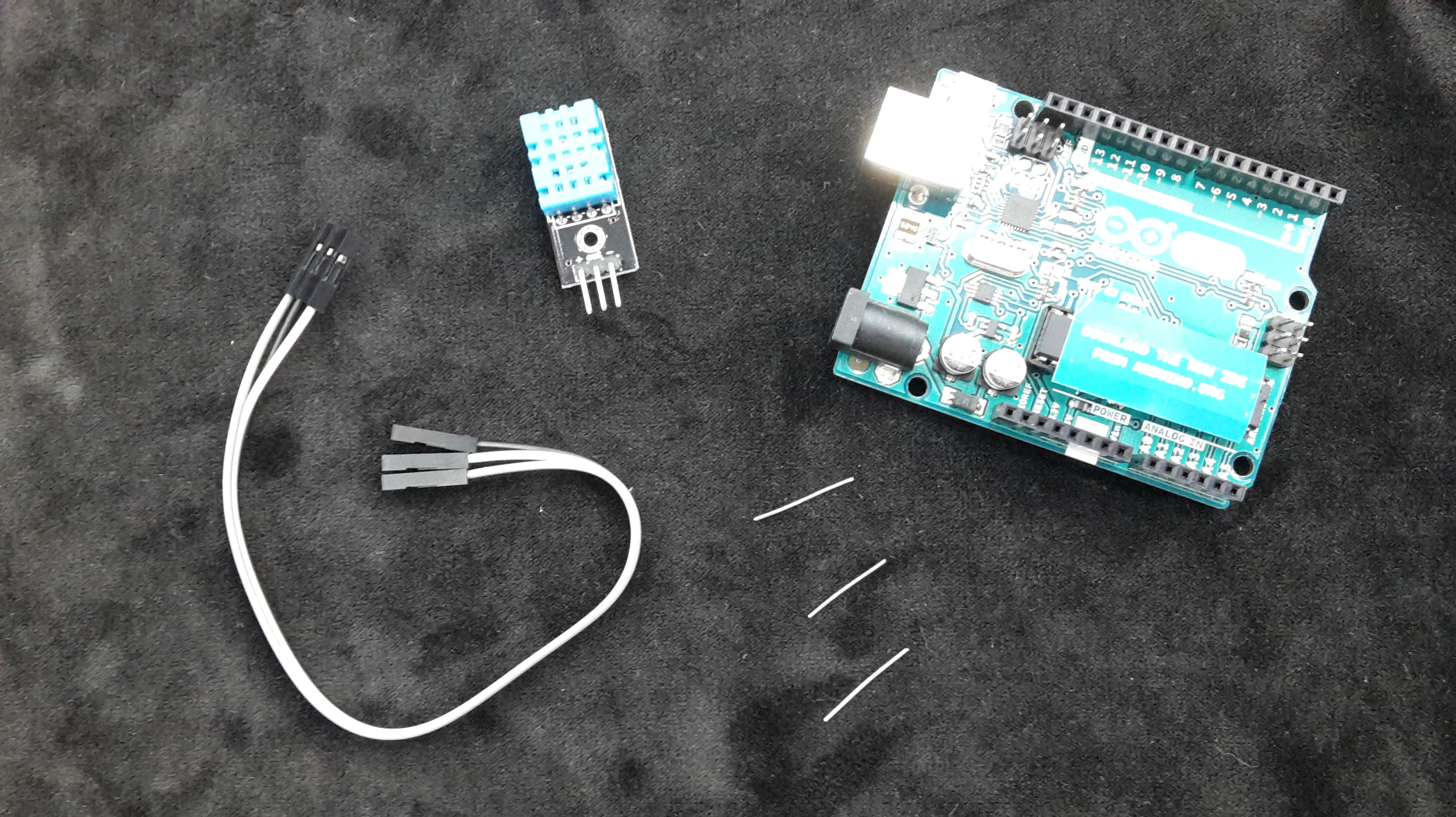
Työpajassa käytimme virtuaalikonetta, johon oli valmiiksi ladattuna istSOS sekä esimerkkiaineistoa. Mielenkiintoinen osuus työpajasta oli oman sensorin rakentaminen ja sen tietojen lataaminen istSOS:n tietokantaan (PostGIS, luonnollisesti).
Sensorina toimi Arduino -mikro-ohjain-alusta ja siihen liitetty lämpösensori. Sensori koottiin paloista ja siihen ladattiin ohjelmisto, joka teki halutun mittauksen.
 Sensori kytkettiin tietokoneesen. Yllättäen saimme sensorin toimimaan: Windows koneessa oleva virtuaalikone (Ubuntu) luki sensorin tietoja. Tosin ensin koetimme olla liian ovelia (konfigurointiin lukemaan sarjaportista, vaikka Windows osasi emuloida tiedot suoraan USB-porttiin).
Sensori kytkettiin tietokoneesen. Yllättäen saimme sensorin toimimaan: Windows koneessa oleva virtuaalikone (Ubuntu) luki sensorin tietoja. Tosin ensin koetimme olla liian ovelia (konfigurointiin lukemaan sarjaportista, vaikka Windows osasi emuloida tiedot suoraan USB-porttiin).
Muutamalla Python-skriptillä sensorin tiedot luettiin istSOS:n ja hallintakonsolista pystyi seuraamaan työpajatilan kuumenemista:

OGC SensorThings API
OGC SensorThings API on kohta hyväksytty OGC:n standardi. Standardi on käsitykseni mukaan ensimmäinen avoin standardi esineiden Internetin (Internet of Things, IoT) sensoritietojen välittämiseen. Sensorititiedoilla tarkoitetaan tässä käytännössä ihan mitä tahansa mittaus- tai havaintotietoa. Mittauksen kohteena voi olla siis lämpötila, säteilytiedot, ihmisen pulssi, sähkömoottorin kierrosluku tms.
Mielenkiintosta nähdä leviääkö standardin käyttö muualle kuin paikkatietoalalle. Standardi on laadittu siten, että hyödyntäminen ja käyttö on mahdollista muissakin kuin puhtaissa paikkatietosovelluksissa. Näissä sovelluksissa paikkatieto on useasti tärkeä, mutta kuitenkin sivuseikka.
OpenDroneMap
Kolmannen työpajan taustalla on OpenDroneMap -projekti. Projekissa rakennetaan työkaluja ja työkalujonoa, jonka avulla on helppo tuottaa lennokeista, multikoptereista, kuumailmapalloista ja muista miehittämömistä aluksista otetuista kuvista paikkatietoja (3D pistepilvi, ortokuvat, tekstuurit yms.).
Mutta ennen kuin OpenDropMap-työkalulle on saatavissa kuvia, pitää olla alusta, jolla kamera voidaan kuljettaa ilman. Joten työpajassa rakennettiin ensimmäiseksi oma multikopteri. Tarkemmin yksi ryhmä rakensi multikopteria, yksi lennokkia, yksi rakensi lennonohjaukseen liittyvät modulit ja yhden ryhmän tehtäväksi jäi kolvaus (ja sitä oli paljon!).
Käytännössä multikopterin rakentaminen ei ole vaikeaa. Seurasimme OpenUAV-projektin ohjeita. Luonnollisesti materiaalien hankkiminen ja kaikkeen odottamattomaan varautuminen vievät suunnattomasti aikaa.
Alussa oli vain kasa osia:

Kuvassa on vain pieni osa multikopterin elektroniikasta. Kuvassa näkyy APM 2.6 lennonohjaustietokone, kasa johtoja, telemetrian lähetysradiot, GPS vastaanotin ja muuta sälää.
Muutaman tunnin säätämisen jälkeen oli multikopterin ohjaustietokone ja moottorit valmiina asennettavaksi multikopterin runkoon:

Virrat palavat ja ohjaustietokone on kytketty Mission Planner -ohjelmistoon. Tuon avulla voi suunnitella lentoradat, päivittää ohjaustietokonetta yms.
Asennusten jälkeen päästiin jo kokeilemaan multikopteria ulkona, lievää jatkosäätöä menossa:

Kun olimme valmiit lennättämään, niin ROK Armed Forces lähetti upseerin adjutantin kanssa valvomaan lentoa. Suomessa lennätys olisi onnistunut ilman näin tarkkaa viranomaisvalvontaa:

Tosiasiassa emme saaneet multikopteria ilmaan: ensin väärin kytketyt moottorit (moottorien tulee pyöriä erisuuntiin) ja sitten lennättämisessä rikkoutui joku johdoista. Oppi: tuskin rupean rakentamaan multikopteria, ellei vapaa-aika ilmaannu erityisen paljon jostain.
Jos harkitset oma toimista kopterikuvausta, niin suositeltu kamera on joku Canonin pokkarikameroista. Canon Hack Development Kit on loistava työkalu kuvauksen automatisointiin ja kaikkeen muuhun hauskaan hakkerointiin.
Posted on 17.09.2015, in Tapahtumat and tagged ALPO, avoin lähdekoodi, FOSS4G. Bookmark the permalink. 3 kommenttia.

Päivitysilmoitus: Drooneilla kartoitusta | Paikkatieto